强化学习的生物学基础
斯金纳的操作性条件反射
总结起来,从生物学基础来看,强化理论是通过给予奖励和惩罚、来改变智能体的行为方式。
智能体表现好、就通过某些方式给奖励;表现不好,就给予惩罚。
(随机奖励指的是 不确定何时会获得奖励的机制。研究表明,这种不确定性会使智能体更投入于某种行为,因为它们总是期待下一次可能的奖励。)
强化学习建模
状态模型

- 初始状态 $S_0$
- 当前玩家 $C$
- 动作集合 $A$
- 状态转移 $P$
- $P(S_{t+1}|S_t,A_t)$表示在时间 t, Agent 在状态$S_t$下采取动作$A_t$ 后转到下一个状态$S_{t+1}$的概率。
- 如何衡量一个环境的复杂程度呢?环境可能达到的所有状态、我们称为状态空间。智能体可能执行的所有动作,称为动作空间。如果这两个空间越大,那么环境就越复杂
- 终止状态 $S_T$
- 奖励 : 某个状态下,智能体采取某动作后得到的分数。
智能体(问题的解)模型
那智能体优化的目标是什么呢?什么叫做聪明呢?
寻找一个最优策略,就是要最大化,从初始状态$S_0$到终止状态$S_T$上、每一步收益 R 的累积。
强化学习就是要得到一个好的策略 π ,使之可以得到好的收益。
策略 $\pi$
- $A_t \leftarrow \pi(S_i)$ 用以表示智能体的策略,也即在每一个状态 $S_t$下选择动作 $A_t$的规则或函数。
- 策略 π 是状态 S 到动作 A 的映射关系,给出了智能体在状态 S 下如何选择动作 A 的决策方法。
- 注意:策略 π 是 全局性 的,任何状态下都要能够给出动作选择。
- 确定性策略 π:对于每个状态 $s \in S$,策略 $\pi(S)$ 总是返回一个确定的动作$A$
目标
寻找最优策略使得收益最大
例子:井字棋的建模
与先前学习的假设对弈双方都是最聪明(双方都采用最优策略)的 MINIMAX 算法不同,强化学习仅仅假设:
- 敌人采用的是 确定性策略 (给定 S 下有确定的 A,而不是随机的 A),但是不一定是最优策略。
- 我们可以和敌人进行 多次对弈
基本思想:从而学习到一个好的对敌策略。
显然,这样的假设更为真实,因为我们能够利用真实情况中,敌人决策的失误来对应的调整我们的策略。
问题建模
初始状态:空棋盘
当前玩家:下子的一方
动作:落子到空的位置
状态转移:落子后棋盘的状态
终止状态:棋盘满或者一方获胜
奖励:胜利+1,失败-1,平 0
解与目标
策略$\pi$:
使用 状态估值表,每个状态一个入口(表项),记录从该状态出发到终局的胜率。根据状态估值表选择动作。
- 学习策略$\pi_1$:大概率选择估值最高的下一个状态,小概率随机选一个动作(探索)
- 目标策略 $\pi_2$:每次选择通往估值最高的下一个状态(贪心)的动作,也即表示在每个状态下选择最优动作的规则。
目标(问题的解):
最优策略 $\pi^*$:使得智能体从初始状态$S_0$ 下到最终的效率 / 胜率最大
训练过程
-
建立状态估值表 $3^9$的最多状态,直接存
估值表函数初值:(根据游戏规则)
- 三个 X 连成一线的状态,价值为 1,因为我们已经贏了。
- 三个 O 连成一线的状态,价值为 0,因为我们已经输了。
- 其他状态的值都为 0.5,表示有 50% 的概率能贏。
-
多次玩 目的:让估值表更加准确
- 利用:大概率贪心选价值最大的地方下
- 探索:偶尔随机地选择以便探索之前没有探索过的地方
利用和探索要平衡
-
边下边修改状态的值, 使得它更接近真实的胜率。
$$ V(S_t) \leftarrow V(S_t) + \alpha[V(S_{t+1})-V(S_t)] $$其中 $\alpha$是一个小的正的分数,称为步长参数,或者学习率
- 初值 $S_0$:只有终局的价值是正确的,中间局面的价值都是估计值 0.5(而这是错的)
- 过程中:状态价值从后面向前传导
- 分析:假设我们一直在一条路径上反复走,每走到终点一次,终局价值至少向上传一步,走多了终将把这个终局的输赢带到最上面的初始节点,于是我们在初始节点就会知道最后的输赢
小结
- 将对手建模在环境里;每次采取动作后面临的状态都是对手执行完它的动作后的新状态;(也可以建模成多智能体博弈问题,有一个对手决策模型,轮到对手落子时让对手模型决策)
- 用值函数表存储状态估值/值函数表 V(S)
- 通过不断对弈更新值函数表
- 根据值函数表、可以得到贪心选最优动作 π*
问题模型的泛化和分析
将概率加进来
环境 && 智能体
模型
-
初始状态 $S_0$(state)
-
当前玩家 C(current player(s))
-
动作 A(action)
-
状态转移 P(transition)
-
终止状态 ST(terminate state)
-
奖励 R(reward)
-
策略 π
-
目标(问题的解)
-
最大化期望累积收益 G
环境:状态转移模型 P 和奖励 R
那么,我们让这个模型能表达更宽泛的问题,我们就要把概率加入这个模型。就是我做一个动作之后,我下一时刻的状态不是确定性的。而是有概率的。
- 状态不一定是确定性的,可以按照概率转移
- 奖励也不一定是确定性的,可以一个概率奖励
智能体:策略 π 和累积收益 G
- 策略 π 给出的动作选择可以是确定的,也可以是一个概率分布
- 折扣因子 γ :( 0 ≤ γ ≤ 1 ),描述未来收益的重要程度
- 若为 1,则近的收益和远的收益一样重要
- 若为 0,则只看下一步的收益(最贪心)
- 累积收益$G = R1+γR_2+γ^2R_3+…=∑{i=1}^Tγ^{i−1}R_i $

奖励函数对智能体最优策略的影响

- 奖励力度对智能体策略影响
策略的评估和最优策略
策略 π 的好坏用 状态价值$V_π$ 来评估:
- 状态价值$V_π$(S) 表示从 S 出发执行策略 π 能获得的累积收益;
- 结束状态(如果有)的价值,总是零

状态价值$V_{\pi}$和动作价值$Q_{\pi}$
-
动作价值$V_\pi(s, \alpha)$ : 表示从 s 出发并做出动作 $\alpha$ ,之后执行策略 $\pi$ 能够获得的累计收益


V,Q 关系:

强化学习的任务
智能体寻找最优策略的路径
智能体使用策略 π0(开始可能是随机的)与环境交互,产生经验(Experience
-
s01,a01,r11,s11,a11,r21,s21,a21,r31,s31,a31,……. 计算 G1 以更新 π0
-
π0s02,a02,r12,s12,a12,r22,s22,a22,r32,s32,a32,……. 计算 G2 以更新 π0
-
π0s03,a03,r13,s13,a13,r23,s23,a23,r33,s33,a33,……. 计算 G3 以更新 π0
智能体根据经验改进 π0 得到 π1,再用 π1 与环境交互以期获得更大
-
Gs01,a01,r11,s11,a11,r21,s21,a21,r31,s31,a31,……. 计算 G1 以更
-
π1s02,a02,r12,s12,a12,r22,s22,a22,r32,s32,a32,……. 计算 G2 以更
-
π1s03,a03,r13,s13,a13,r23,s23,a23,r33,s33,a33,……. 计算 G3 以更新 π1……
如此往复,直到得到最(更)好的 π 前面看到的打砖块 AI 和王者鲁班七号 AI 都是这么得来
多臂老虎机问题
一个单臂老虎机,就是你给它投个币,相当于你摇它一下,它会给你吐出个随机的收益,这么一个赌博机器。这个收益服从正态分布。
但是多臂老虎机,指的是有一排老虎机摆在你面前,一个人占一排。不同机器的收益是不一样的,服从分布的均值和方差你是不知道的。

- 没摇过的有个缺省值,例如:0
- 时间 t 时选的动作为 At, 对应的奖励为 Rt. 动
- 作 a 的价值为 Q*(a)≈ E [ Rt | At = a ] . (老虎机问题中,状态 s 是不变的,不考虑 s 了)

计算动作价值 q(s,a)
计算动作价值的一般形式。
新的估计 = 老的估值 + 当前步数 X 误差。
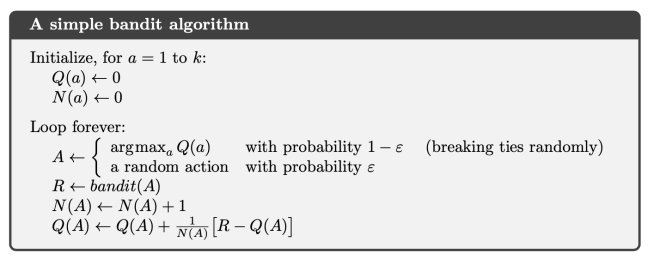
代码的话,刚开始 Q 和 N 都为 0 循环的时候,有个 epsilon 是一个很小的值。大概率根据 Q 最大的来选择动作 A。但有小概率随机选择动作,达到探索的功能。
然后后面就是更新 Q 了
大数定理,无限次后, Qt(a) 收敛至 Q*(a)
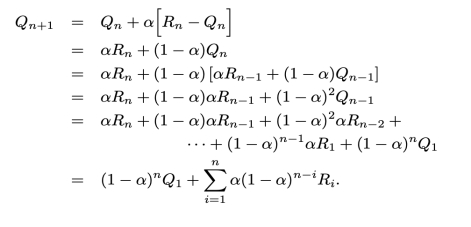
取 α = 1/nα 随时间变小 Qn 趋近于均值
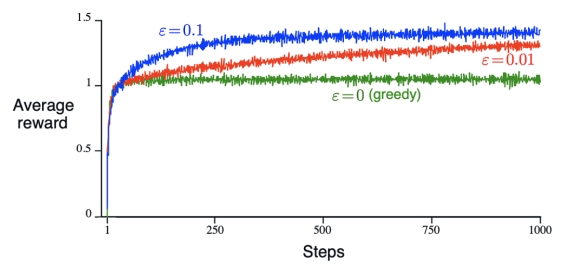
贪心 v.s. $\epsilon $ 贪心
贪心核心思想:大部分时间选择贪心动作,偶尔随机选择。
$\epsilon $ 通过引入 随机性 来鼓励探索,避免陷入局部最优。
2000 次多臂老虎机
$\epsilon 贪心$ v.s. 乐观初始值贪心
乐观初始值贪心
- 负面:参数设定依赖:初值需要由人工给出,且设定不当可能影响算法性能。
- 正面:提供先验知识:合理的初值能提供先验经验,帮助算法确定奖励的期望量级。
- 学习效率:初值越准确,算法需要的调整次数越少,学习效率越高。
对比 Q1(a) = +5(探索鼓励) 和 Q1(a) = 0
- 如同人生,期望高就会勇于尝试新路径!但找到方向的时候,别乱探索了!
- 乐观初值鼓励探索,对于固定问题是非常有效的小技巧,但是并非是普遍有效的鼓励探索的方法
- 所以,如果情况变了,你还是要探索的!例如,对于非固定问题不管用,因为它鼓励探索是临时性的,为什么?并非主动探索,旁边有人变好它是不觉知的,遭遇大挫折时才会改变
乐观初始值贪心适用性:
-
固定问题:问题环境和奖励机制在整个学习过程中不发生变化,也即 P(s′∣s,a)P(s′∣s,a) 和 R(s,a)R(s,a) 固定,乐观初值有效
利用 高初值 鼓励探索,迅速收敛到最优解。
-
非固定问题:问题环境或奖励机制会随时间变化,也即 P(s′∣s,a,t)P(s′∣s,a,t) 和 R(s,a,t)R(s,a,t) 随时间 tt 变化,乐观初值探索 不适用,ϵϵ 贪心更适用。
通过 随机选择 保持探索,适应环境变化。
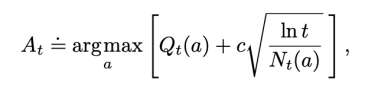
UCB(upper-confidence-bound)
实蒙特卡洛搜索的方法,是从这里进化来的。
Argmax 选动作的时候,又要看估值、又要看新鲜程度。这个想法在蒙特卡洛树搜索的时候用过。 UCB 将 “当前估值” 和 “新鲜程度” 加权和。
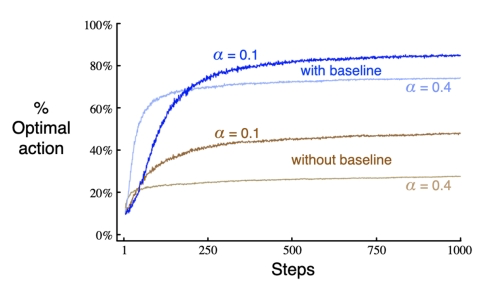
Gradient Bandit Algorithm
核心思想:
- ϵ 贪心大概率选最好的动作,其他动作 等同对待,其实也可以给每个动作一个对应的选择概率
- 通过给每个动作 a 一个 数值优先度 $H_t \in \mathbf{R}$来影响选择概率。
- 优先度越大,动作被选中的概率越大。
据此,我们给出如下设计:
-
采用 Softmax 函数归一化,使所有可行动作的概率和为 1
-
初始时,所有动作的倾向性相同($H_1$ = 0)
-
在每一步,按概率选择了动作 $A_t$ 后得到及时奖励 $R_t$,根据奖励 $R_t$ 的大小,修改所有动作的优先度

合理的划分出好的动作和坏的动作
总结
- $\epsilon$贪心算法有一小部分时间随机选:固定概率的随机探索
- UCB 偏向尝试次数小的动作:根据统计的探索、更聪明的探索
- 梯度下降法不是估计动作的价值,而是动作的优先顺序,使用 softmax 选动作. 其实有探索,因为动作采用 softmax 有概率
- 简单的设置乐观初值可以使得贪心算法也具有相当的探索性