问题描述模型
一个问题的定义
- 初始状态 $S_0$。
- 可选动作。在一个给定状态 s, ACTIONS(s) 返回一组可能的动作。
- 状态转移模型。在状态 s 下执行动作 a 之后所到达的状态用 RESULT(s,a) 表示。 一个状态经过一个动作后来到的下一个状态我们称之为后继状态 。 初始状态、动作、状态转移模型构成了状态空间。 状态空间构成一幅有向图。 路径是从一个状态出发通过一系列动作所经过的状态序列。
- 目标状态。
- 路径花费。每条路径可以有一个花费,用来度量解的好坏。
一个问题的解 是从初始状态出发到达目标状态的一个动作序列。解的质量可以用路径的花费来度量。 最优解是所有解中花费最小的一个。
eg: 罗马尼亚寻径问题
- 初始状态:In(Arad)
- 可行动作:在 Arad,可选的动作是三个,分别去到 Z,S,T 三市
- 状态转移,走了一条路之后到了哪里呢?例如说走了去 Z 市的路,后继状态就是 In(Z)。这里所有城市构成状态空间,所有道路构成动作空间。路径就是从一个城市到另一个城市的通路。
- 目标状态:因为最终要去 Bucharest,所以到了 Bucharest,就不用再往下走了。
- 路径花费,就是把从 Arad 走到 Bucharest,的路径上的每段路的长度加起来
e g: 八数码问题
状态: 一个状态描述了八个数字和一个空格所在的位置。
- 初始状态: 任何一个状态都可以是初始状态。
- 动作: 空格可以上、下、左、右移动。只要移动后还在 3*3 的方格内。
- 状态转移模型: 给定一个状态和动作,给出之后的状态。
- 目标: 给出想要达到的数字和空格分布状态
- 路径花费: 每步花费 1, 路径花费就是移动的总步数。
搜索求解
搜索树
父节点,子节点,开节点,闭节点,搜索策略
一个状态经过一个动作,到了另一个状态。那么我们称发生动作之前的状态是父节点,而动作发生后的后继状态,称为子节点。
如果一个状态,没有节点,也就是说不能再往下搜索了,那么这个状态称为叶节点。没有儿子可展开的点叫叶节点。
开节点和闭节点
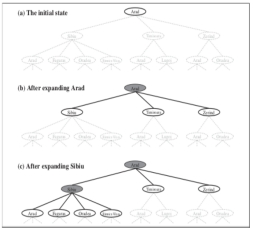
- 最开始,树上只有根节点,也就是初始状态。搜索是一个动态过程。整个搜索的过程就是不断依据可行动作展开搜索树的过程。
- 然后展开一步以后,我们多了几个新的叶节点,也就是对于根节点的子节点,这几个节点称为开节点,因为是刚刚展开的。英文叫做 frontier 也叫 open list。
- 再展开一步以后,我们看多了几个新的叶节点,这些新的叶节点和原来的叶节点一起,都是叶节点。这个时候,闭节点是什么呢?图中灰色的节点称为闭节点,因为他们是已经被展开过的了。英文叫做 closed list 或者 explored set,explored 的意思是已经被探索过的节点。
搜索策略 对于一个算法而言,我们在一个时刻有那么多的开节点,先展开谁、后展开谁,就构成了不同的搜索策略搜索策略
就是如何在开节点集上,选择一个节点,把它优先展开。在最开始,树上只有根节点,也就是初始状态。事实上,搜索是一个动态过程。整个搜索的过程就是不断依据可行动作展开搜索树的过程。展开搜索树我们要做的就是先展开谁,后展开谁。如何选择下一个节点去展开被称为 search strategy 搜索策略。
树搜索,图搜索
树搜索:
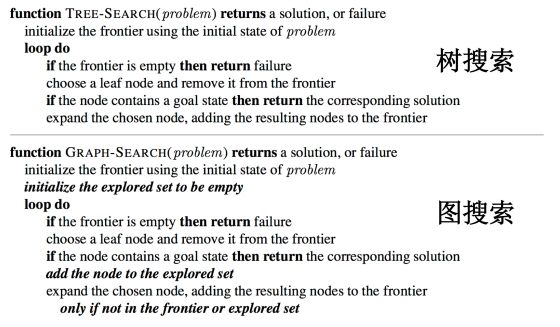
我们看看这个 Tree-Search 的函数,输入的是一个问题 problem,就是我们刚刚定义的问题五元组。函数返回 return 的是一个解决方案 solution,或者告诉我们找不到解 failure。
最开始初始化 frontier,frontier 就是一个开节点,最开始把开节点设置为问题的初始状态,问题开始于一个点。然后,我们做一个循环,首先看看 frontier 能不能被展开,如果不能被展开,就代表没有解,则返回失败。如果 frontier 有解的话,我们就从 frontier 里面拿出一个叶节点,然后判断一下拿出来的节点是不是目标,如果是的话,我们就可以返回解决方案了。
如果不是目标的话,那我们还要继续展开这个叶节点,然后把新获得的节点加到 frontier 开节点集合里面。提供给下一次循环来选择展开用。
这些叶节点都是开节点,因为它们都没有被展开过。
那么不断循环,这就是树搜索。我们最开始有一个根节点,开展以后把叶节点都放到 frontier 集合里面,然后取出一个来再展开,然后新获得的节点再放到 frontier 集合里面。
这个树搜索,并没记住我们以前展开过什么的,只是在不停地展开。
图搜索:
我们看看 Graph-Search 这个函数。它的输入输出和树搜索是一样的。输入。。。输出。。。
那么这里黑体字是新加的一些操作。
Initialize the explored set to be empty,我们初始化一个空的闭节点集合,定义这个新变量的目的是用来存储哪些节点已经被展开搜索过的。然后开始循环,这跟刚才树搜索是一样的。Frontier 如果为空,则返回 failure。如果有也叶节点,则选择一个叶节点,如果叶节点是目标,则找到解了。否则的话,add the node to the explored set,把这个节点放到闭节点集合里面,代表这个节点已经被探索展开过了。后面就是把它的儿子都加到 frontier 集里面。但这里有个条件,only if not in the frontier or explored set,这个地方我做了一个重复判断,就是如果加这个新节点的时候,我们要看看这个节点在不在 frontier 里面,以及在不在已经被搜索过的节点集合里面,如果在的话就不加了。只有它不在的时候,我们才做这个事情。那么这个就是图搜索和树搜索的不同。
图搜索用 explored set 这个机制,就可以避免重复地搜索某些节点。
搜索算法的评价
- 完备性 Completeness: 如果存在解,该算法是否一定会找到解?
- 最优性 Optimality: 该算法是否能够找到最优解?
- 时间复杂度 Time complexity: 算法找到解需要花长时间?
- 空间复杂度 Space complexity: 算法需要多少内存用于搜索?
问题难度和算法复杂度
- 问题的难度 problem difficulty 两种方法来度量:图规模和搜索树规模:
- 图规模(对应图搜索)
- 当输入是一个图时,例如罗马尼亚地图寻径问题,理论上,我们用状态空间图的大小来衡量问题的规模 |V | + |E|, V 是点数 ,E 边数。
- 搜索树的规模(对应树搜索)
- 用如下二个指标来度量:
- b, 分支数 branching factor 或者节点所具有的最大子节点数目;
- d, depth,最浅的目标状态所在;
- 用如下二个指标来度量:
- 图规模(对应图搜索)
- 算法复杂度
- 时间复杂度经常用搜索树展开的节点的数目表示。
- 空间复杂度通常用需要存储的最大节点数目来估计。
无信息搜索
无信息搜索是指在搜索过程中不使用任何启发信息的搜索方法。无信息搜索方法通常会遍历整个搜索空间,直到找到解或者确定无解。
无信息搜索可以理解为,没有任何的先验知识,就是盲目地去试(尽管盲目地试的时候也可以有些尝试时优先级策略)。